deltasigma
Nouveau membre
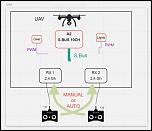
Bonjour, Je dois concevoir une système hyper redondant pour un multirotor avec un contrôleur de vol A2.
Juste pour ce controleur j'ai besoin de plus de 10 canaux, je dois donc utiliser le S.Bus. J'ai aussi beosind e 2 voix traditionnelles PWM pour les lumières et le train d’atterrissage.
Le tout doit être potentiellement piloté par 2 pilotes (maitre et second en attente). Le pilote#1 peut manuellement donner le contrôle au deuxième pilote et vice et versa. En cas de panne du TX en contrôle, le second doit prendre charge automatiquement.
J'ai commencé à regarder les technologies JETI et FRsky mais je suis un peux perdu alors si vous pouviez me dire
Est-ce une configuration que vous avez déjà vue et si oui avec quel équipement.
un exemple:

Juste pour ce controleur j'ai besoin de plus de 10 canaux, je dois donc utiliser le S.Bus. J'ai aussi beosind e 2 voix traditionnelles PWM pour les lumières et le train d’atterrissage.
Le tout doit être potentiellement piloté par 2 pilotes (maitre et second en attente). Le pilote#1 peut manuellement donner le contrôle au deuxième pilote et vice et versa. En cas de panne du TX en contrôle, le second doit prendre charge automatiquement.
J'ai commencé à regarder les technologies JETI et FRsky mais je suis un peux perdu alors si vous pouviez me dire
Est-ce une configuration que vous avez déjà vue et si oui avec quel équipement.
un exemple: