Balzakas'ket;2100583 à dit:
.
Je pense qu'il y a toujours acceleration de la dérive dans ce cas-çi, .
Bonjour,
je ne saisis pas quald tu parles "d'accélération" du gouvernail.
Dans le cas d'un entrainement par tringle rigide et guignol sur gouvernail, pour une rotation du servo a régime constant, la variation angulaire est doncconstante mais la translation varie selon le sinus de l'angle. Cette variation de vitesse de transslation est à nouveau transformé en mouvement circulaire, et si le bas de levier est le même que celui du servo, la vitesse angulaire sera constante.
Seule, la translation de la bielle est concernée par une accélération au début, puis un ralentissement au fur et à mesure que les axes d'articulation se rrapprochent des axes de rotaion du servo et gouvernail
Dans le cas d'un entraînement par poulie de même diamètre, le mouvement de la poulie menante est fidèlement reproduit par la poulie menée.
Dand le cas d'un entraînement par poulie de diamètre différent, la vitesse de rotation de la poulie menée (gouvernail) est celui de la poulie menante multipliée par le rapport pouliemanante/poulie menée.
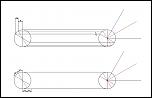
On voit sur l'image du haut, un plateau de 20mm de dia, qu'une variation angulaire des 30 premiers degrés déplace la tringle de 10mm, les 30° suivant, plus que de 7,3mm et il ne resterait plus que 2,3 pour atteindre les 90°...la variation de vitesse de translation est sinusoïdale.
Sur le système à poulie, celles ci "libèrent" 10,5mm tous les 30°, la variation est linéaire.
L'avantage des poulies est que le servo travaille à puissnace constante, il n'y a pas de point "dur" comme avec des bielles.