Bonjour
alors, dans l'ordre
fr3d;1715313 à dit:
quel connecteur usb<->arduino utilises tu ?
FTDL 5V sparkfun
fr3d;1715313 à dit:
quand tu as charger "|>" le prog as tu eu "uploading done" ?
oui
fr3d;1715313 à dit:
as tu les leds qui clignotent ?
sur l'arduino, la rouge fixe et la verte clignote quand je suis connecté en usb
lors de l'upload, tx et rx du ftdi clignotent
fr3d;1715313 à dit:
as tu seletionner le port com qui va bien depuis multiwiiconf ?
oui, pour moi c est le com 4
fr3d;1715313 à dit:
as tu cliquer sur "com -" qui deviendra "com +" ?
je clique sur com 4 et sa passe au vert
fr3d;1715313 à dit:
as tu cliqués sur "start" puis "read" des infos doivent apparaitre.
oui, mais dans le graph, j ai une ligne droite continu
fr3d;1715313 à dit:
as tu les bargraph roll,pitch,yaw et throttle qui bougent ? (il faut alimenter le montage et le recepteur depuis un seul esc, un seul fil rouge les autres doivent etre deconnecté) en fonction des manches de ta radio ?
oui le s valeurs bougent sur les 3 axes( mais rien si je bouge les gaz)
fr3d;1715313 à dit:
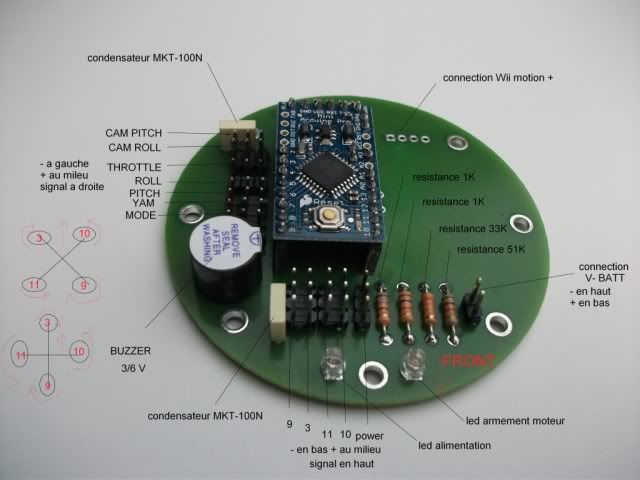
as tu essayer d'inverser les fils sda et scl sur ta carte (jaune/violet)?
non, pas encore, mais vu que c est une wm+ original, j ai bien vérifier et les connections sont les bonnes( mais à tester)
quand je met sous tension le quad, j ai sur l arduino la diode rouge fixe et la verte qui clignote.
voici ma prog*:
/*
MultiWiiCopter by Alexandre Dubus
radio-commande.com
December 2010 V1.5
This program is free software: you can redistribute it and/or modify
it under the terms of the GNU General Public License as published by
the Free Software Foundation, either version 3 of the License, or
any later version. see <http://www.gnu.org/licenses/>
*/
/*******************************/
/****CONFIGURABLE PARAMETERS****/
/*******************************/
/* Set the minimum throttle command sent to the ESC (Electronic Speed Controller) */
/* This is the minimum value that allow motors to run at a idle speed */
#define MINTHROTTLE 1300 // for Turnigy Plush ESCs 10A
//#define MINTHROTTLE 1120 // for Super Simple ESCs 10A
/* The type of multicopter */
//#define GIMBAL
//#define BI //experimental
//#define TRI
//#define QUADP
#define QUADX
//#define Y6
//#define HEX6
#define YAW_DIRECTION 1 // if you want to reverse the yaw correction direction (TRICOPTER only)
//#define YAW_DIRECTION -1
#define I2C_SPEED 100000L //100kHz normal mode, this value must be used for a genuine WMP
//#define I2C_SPEED 400000L //400kHz fast mode, it works only with some WMP clones
/* This is the speed of the serial interface. 115200 kbit/s is the best option for a USB connection.*/
#define SERIAL_COM_SPEED 115200
/* The following lines apply only for specific receiver with only one PPM sum signal, on digital PIN 2 */
/* If your receiver is concerned, uncomment on of these line. Note this is mandatory for a Y6 setup */
/* Select the right line depending on your radio brand. Feel free to modify the order in your PPM order is different */
//#define SERIAL_SUM_PPM PITCH,YAW,THROTTLE,ROLL,AUX1 //For Graupner/Spektrum
//#define SERIAL_SUM_PPM ROLL,PITCH,THROTTLE,YAW,AUX1 //For Robe/Hitec/Futaba
/* The following lines apply only for a pitch/roll tilt stabilization system */
/* It is compatible only with a QUAD+ or QUAX setup or a pure GIMBLE setup*/
/* Uncomment the first line to activate it */
//#define SERVO_TILT
#define TILT_PITCH_MIN 1020 //servo travel min, don't set it below 1020
#define TILT_PITCH_MAX 2000 //servo travel max, max value=2000
#define TILT_PITCH_MIDDLE 1500 //servo neutral value
#define TILT_PITCH_PROP 10 //servo proportional (tied to angle) ; can be negative to invert movement
#define TILT_ROLL_MIN 1020
#define TILT_ROLL_MAX 2000
#define TILT_ROLL_MIDDLE 1500
#define TILT_ROLL_PROP 10
/* In order to save space, it's possibile to desactivate the LCD configuration functions */
/* comment this line only if you don't plan to used a LCD */
#define LCD_CONF
/* motors will not spin when the throttle command is in low position */
/* this is an alternative method to stop immediately the motors */
//#define MOTOR_STOP
/* I2C barometer */
//#define BMP085
/* I2C accelerometer */ //experimental, for graph visualization only
//#define ADXL345
je n arrive pas non plus à faire tourner les moteurs

ils bipent bien à la connexion du lipo puis plus rien
amitiés, Eric