cameo59
Membre actif
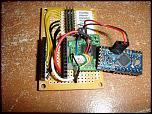
Afin de ne pas poursuivre en HS sur un autre post ( Tricopter dans "Immersion" ) je propose de consigner ici toutes les infos à propos des multicopters ( du tri à l'okto ) dont l'électronique est gérée par une carte ARDUINO et 1 ou 2 périphériques de console WII: le Wiimotion Plus ( =WMP ) et le Nunchuk (=NK).
L'initiateur du projet a consigné toutes les infos sur son site:
Multiwii
et le site pour le software:
software multiwii
Donc un autre lien tentaculaire qui permet de suivre l'avancée du projet: il est notamment question de remplacer le NK par un authentique accéléromètre:
MultiWiiCopter (previously TriWiiCopter) - RC Groups
Pour faire vos courses, un autre lien de RCgroups lui aussi très instructif:
BuildLog for the ArduWiino NK Quad - RC Groups
A titre perso, je fais voler un TRI à base de carte KK: j'en suis très satisfait. Je suis en train de fabriquer un quad ( 35cm de moteur à moteur ) avec carte Arduino mini + WMP.
Je laisse de coté l'option NK ( = fonction d'autostabilité ), qui reste délicate à régler et nécessite un multicopter exempt de TOUTE vibration parasite pour etre efficace.
L'initiateur du projet a consigné toutes les infos sur son site:
Multiwii
et le site pour le software:
software multiwii
Donc un autre lien tentaculaire qui permet de suivre l'avancée du projet: il est notamment question de remplacer le NK par un authentique accéléromètre:
MultiWiiCopter (previously TriWiiCopter) - RC Groups
Pour faire vos courses, un autre lien de RCgroups lui aussi très instructif:
BuildLog for the ArduWiino NK Quad - RC Groups
A titre perso, je fais voler un TRI à base de carte KK: j'en suis très satisfait. Je suis en train de fabriquer un quad ( 35cm de moteur à moteur ) avec carte Arduino mini + WMP.
Je laisse de coté l'option NK ( = fonction d'autostabilité ), qui reste délicate à régler et nécessite un multicopter exempt de TOUTE vibration parasite pour etre efficace.


")