triple
Membre actif
salut
vu le nombre de fois que ce type de construction à été abordé sur ce forum et sur le net , ce post n'est qu'un petit résumé des points sur lesquels j'ai buté durant la mise au point de la carte et du parametrage du MultiWii
il y a quelques temps , j'ai commencé par là : tricoptère avec 4 gyro HK ( http://www.modelisme.com/forum/heli...-coptere-4-gyros-sans-carte-electronique.html )
voilà la suite : mon « tréteau » avec une hélice de plus ( l'avant est à gauche.....") )
)
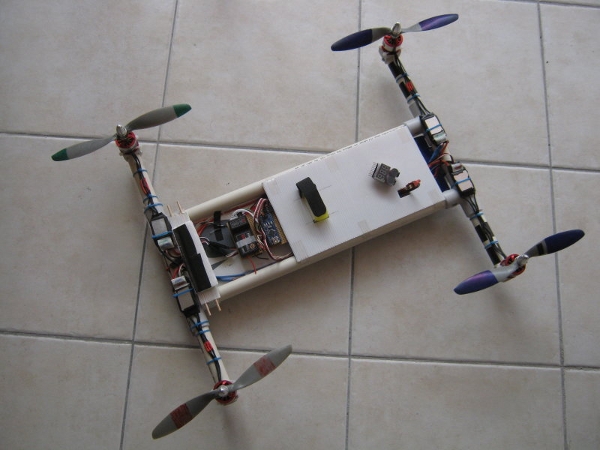
pour le châssis , c'est par là que ça se passe : Quadriolo, un quadrimoteur en tube PVC
tous mes tubes font 40 cm de long , il est un peut plus long que large , les PID pitch et roll sont légèrement différents , ça donne 53 cm entre axes moteurs en diagonale
voilà ma config :
4 moteurs CF2822 1200Kv
hélices 8x3.8
4 ESC SuperSimple 15-18 HK <<<<< non flashés
rx Assan 6 voies
gyro – accelero MPU6050
un Arduino NANO avec le micro-processeur 328P :
l'interface USB est intégré à l'Arduino NANO donc pas besoin d'USBASP pour le programmer , il est câblé comme ça :

vue de la platine et du MPU : l'avant est vers la gauche

l'USB , une fois connecté , alimente l'Arduino , le récepteur , le MPU6050 >>>ça permet de faire les 1er réglages de la platine avec l'interface graphique sans brancher ni les ESC ni les moteurs
la sortie D13 est relié par une piste sur l'Arduino à la Led "L" ( la + à droite ) donc pas besoin de câbler la Led "STATUS" présente sur les schémas électriques du multiwii trouvés sur le net
l'ordre des plots A0 à A7 peut-être inversé haut-bas suivant l'Aduino Nano > gaffe aux soudures SDA et SCL sur A4 et A5
le câblage :
les "-" des 4 ESC sont soudés ensembles reliés au " - " récepteur et "GND" de l'Arduino
le "+" 5V de l'ESC le plus "haut" sur la platine alimente le récepteur , l'Arduino et le MPU6050
les 3 autres « +5V » pourront servir à alimenter d'autres accessoires genre Led's en bout de bras......
charger le prog dans la puce :
brancher le cable USB ordi-Aduino , lancer le prog « arduino-1.0.1 « , étant sous Linux , tout ce petit monde "discute" ensemble sans driver
dans le prog , choisir la bonne puce : ici NANO w/ Atmega 328 , charger le sketch , version 2.1 pour moi
j'ai dé-commenté ces quelques lignes du fichier config.h
#define QUADX
#define MINTHROTTLE 1170
#define I2C_SPEED 100000L
#define MPU6050 //combo + ACC
/* MPU6050 Low pass filter setting < < < < je n'ai pas eu besoin de dé-commenter une des ligne du filtre passe-bas :
rotors moteurs et hélices sont équilibrés au scotch + pointeur laser comme vu sur le net , il reste encore de très légères vibrations résiduelles mais apparemment sans perturber le MPU6050 ni le comportement en vol
allumer l'émetteur , gaz et trim à 0 aucun ESC branchés , l'USB alimente l'Arduino , le Rx et le MPU
démarrage du GUI , sélection en haut à gauche de la sortie USB utilisée – TTYUSB0 chez moi sous Linux , pour Windows il faudra trouver le bon port COM
un clic sur "START" , tout s'affiche
avec les sub-trims : réglage des neutres à 1500ms pour les 4 axes ( valeurs visibles en haut à droite dans le GUI )
ajuster les fins de courses sur l'émetteur pour amener les valeurs sur les 4 axes à moins de 1000ms et plus de 2000ms , manches poussés en butée à fond dans un sens et dans l'autre
perso , la MX16s avec 130% de débattement sur chaque axe conduisent à des valeurs autour de 950 et 2050 ms >>> même en mettant du trim à fond il est toujours possible d'armer , désarmer les moteurs , actionner le mode stable sur un inter
IMPORTANT : à partir de là , plus question de toucher aux sub-trim , fins de courses et dual-rate de la radio , si le futur engin est trop ou pas assez vif
ces réglages se feront uniquement à partir du GUI ( case RATE et-ou EXPO )
seul le réglage qui pourra être fait sur la radio au terrain est l'EXPO qui ne modifie pas les neutres et courses totales des manches
à ne surtout pas oublier : maintenant que les courses des manches sont établies aux bonne valeurs , prendre un récepteur seul - non branché avec l'Arduino - et étalonner les ESC chacun leur tour pour qu'ils enregistrent la course du manche de gaz
Vérifier , en faisant bouger l'engin à la main , que les gyros et accéléros fonctionnent dans le bon sens :
Inclinaison vers la droite -> pic Gyro Roll Positif / accéléro Roll augmente
Inclinaison vers l’avant-> pic Gyro Pitch Positif / accéléro Pitch augmente
Rotation lacet vers la droite : pic Gyro Roll Positif
si le courbes ne varient pas dans le bon sens et-ou sur le bon axe , modifier cette partie du code du fichier config.h et le recharger dans l'Arduino
/* individual sensor orientation */
#define ACC_ORIENTATION(X, Y, Z) {accADC[ROLL] = Y; accADC[PITCH] = -X; accADC[YAW] = Z;}
#define GYRO_ORIENTATION(X, Y, Z) {gyroADC[ROLL] = X; gyroADC[PITCH] = Y; gyroADC[YAW] = -Z;}
pour mon MPU6050 , dans la partie accéléromètre : le " = X " est devenu " = Y " et le " = Y " est devenu " = -X "
voilà une capture écran pour les PID , ça pourra servir de base qu'il faudra ajuster suivant son matériel , masse , dimensions des bras......

en vrac :
l'engin est très stable même en mode accro
le passage en vol au mode stable ne provoque aucun mouvement parasite ni réaction de l'engin , ça fait juste "bizarre" de devoir maintenir le manche poussé du coté où l'on veut aller
le seul petit soucis : sur une action en lacet , droite ou gauche , le quad monte légèrement - ok , je pinaille , mais si quelqu'un a su supprimer ou atténuer ce mouvement ascendant , je suis preneur du truc
une petite vidéo
http://www.dailymotion.com/video/xx...ge-mode-accro-stable-accro_sport#.USkBxeLEX9J
A+ bon vol
vu le nombre de fois que ce type de construction à été abordé sur ce forum et sur le net , ce post n'est qu'un petit résumé des points sur lesquels j'ai buté durant la mise au point de la carte et du parametrage du MultiWii
il y a quelques temps , j'ai commencé par là : tricoptère avec 4 gyro HK ( http://www.modelisme.com/forum/heli...-coptere-4-gyros-sans-carte-electronique.html )
voilà la suite : mon « tréteau » avec une hélice de plus ( l'avant est à gauche.....
)
pour le châssis , c'est par là que ça se passe : Quadriolo, un quadrimoteur en tube PVC
tous mes tubes font 40 cm de long , il est un peut plus long que large , les PID pitch et roll sont légèrement différents , ça donne 53 cm entre axes moteurs en diagonale
voilà ma config :
4 moteurs CF2822 1200Kv
hélices 8x3.8
4 ESC SuperSimple 15-18 HK <<<<< non flashés
rx Assan 6 voies
gyro – accelero MPU6050
un Arduino NANO avec le micro-processeur 328P :
l'interface USB est intégré à l'Arduino NANO donc pas besoin d'USBASP pour le programmer , il est câblé comme ça :
vue de la platine et du MPU : l'avant est vers la gauche
l'USB , une fois connecté , alimente l'Arduino , le récepteur , le MPU6050
>>>ça permet de faire les 1er réglages de la platine avec l'interface graphique sans brancher ni les ESC ni les moteurs la sortie D13 est relié par une piste sur l'Arduino à la Led "L" ( la + à droite ) donc pas besoin de câbler la Led "STATUS" présente sur les schémas électriques du multiwii trouvés sur le net
l'ordre des plots A0 à A7 peut-être inversé haut-bas suivant l'Aduino Nano > gaffe aux soudures SDA et SCL sur A4 et A5
le câblage :
les "-" des 4 ESC sont soudés ensembles reliés au " - " récepteur et "GND" de l'Arduino
le "+" 5V de l'ESC le plus "haut" sur la platine alimente le récepteur , l'Arduino et le MPU6050
les 3 autres « +5V » pourront servir à alimenter d'autres accessoires genre Led's en bout de bras......
charger le prog dans la puce :
brancher le cable USB ordi-Aduino , lancer le prog « arduino-1.0.1 « , étant sous Linux , tout ce petit monde "discute" ensemble sans driver
dans le prog , choisir la bonne puce : ici NANO w/ Atmega 328 , charger le sketch , version 2.1 pour moi
j'ai dé-commenté ces quelques lignes du fichier config.h
#define QUADX
#define MINTHROTTLE 1170
#define I2C_SPEED 100000L
#define MPU6050 //combo + ACC
/* MPU6050 Low pass filter setting < < < < je n'ai pas eu besoin de dé-commenter une des ligne du filtre passe-bas :
rotors moteurs et hélices sont équilibrés au scotch + pointeur laser comme vu sur le net , il reste encore de très légères vibrations résiduelles mais apparemment sans perturber le MPU6050 ni le comportement en vol
allumer l'émetteur , gaz et trim à 0 aucun ESC branchés , l'USB alimente l'Arduino , le Rx et le MPU
démarrage du GUI , sélection en haut à gauche de la sortie USB utilisée – TTYUSB0 chez moi sous Linux , pour Windows il faudra trouver le bon port COM
un clic sur "START" , tout s'affiche
avec les sub-trims : réglage des neutres à 1500ms pour les 4 axes ( valeurs visibles en haut à droite dans le GUI )
ajuster les fins de courses sur l'émetteur pour amener les valeurs sur les 4 axes à moins de 1000ms et plus de 2000ms , manches poussés en butée à fond dans un sens et dans l'autre
perso , la MX16s avec 130% de débattement sur chaque axe conduisent à des valeurs autour de 950 et 2050 ms >>> même en mettant du trim à fond il est toujours possible d'armer , désarmer les moteurs , actionner le mode stable sur un inter
IMPORTANT : à partir de là , plus question de toucher aux sub-trim , fins de courses et dual-rate de la radio , si le futur engin est trop ou pas assez vif
ces réglages se feront uniquement à partir du GUI ( case RATE et-ou EXPO )
seul le réglage qui pourra être fait sur la radio au terrain est l'EXPO qui ne modifie pas les neutres et courses totales des manches
à ne surtout pas oublier : maintenant que les courses des manches sont établies aux bonne valeurs , prendre un récepteur seul - non branché avec l'Arduino - et étalonner les ESC chacun leur tour pour qu'ils enregistrent la course du manche de gaz
Vérifier , en faisant bouger l'engin à la main , que les gyros et accéléros fonctionnent dans le bon sens :
Inclinaison vers la droite -> pic Gyro Roll Positif / accéléro Roll augmente
Inclinaison vers l’avant-> pic Gyro Pitch Positif / accéléro Pitch augmente
Rotation lacet vers la droite : pic Gyro Roll Positif
si le courbes ne varient pas dans le bon sens et-ou sur le bon axe , modifier cette partie du code du fichier config.h et le recharger dans l'Arduino
/* individual sensor orientation */
#define ACC_ORIENTATION(X, Y, Z) {accADC[ROLL] = Y; accADC[PITCH] = -X; accADC[YAW] = Z;}
#define GYRO_ORIENTATION(X, Y, Z) {gyroADC[ROLL] = X; gyroADC[PITCH] = Y; gyroADC[YAW] = -Z;}
pour mon MPU6050 , dans la partie accéléromètre : le " = X " est devenu " = Y " et le " = Y " est devenu " = -X "
voilà une capture écran pour les PID , ça pourra servir de base qu'il faudra ajuster suivant son matériel , masse , dimensions des bras......
en vrac :
l'engin est très stable même en mode accro
le passage en vol au mode stable ne provoque aucun mouvement parasite ni réaction de l'engin , ça fait juste "bizarre" de devoir maintenir le manche poussé du coté où l'on veut aller
le seul petit soucis : sur une action en lacet , droite ou gauche , le quad monte légèrement - ok , je pinaille , mais si quelqu'un a su supprimer ou atténuer ce mouvement ascendant , je suis preneur du truc
une petite vidéo
http://www.dailymotion.com/video/xx...ge-mode-accro-stable-accro_sport#.USkBxeLEX9J
A+ bon vol
")