Suite aux tests du tricopter de 60 cm de rayon, voici la construction d'une version orientée vers l'efficacité et la légèreté.
BANDE DE VEINARDS, je viens de faire un résumé à la fin de tous les réglages :
http://www.modelisme.com/forum/heli...cm-pour-prise-de-vues-aeriennes-et-fpv-4.html
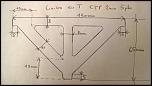
et finalement, la forme sera en Y et non en T.
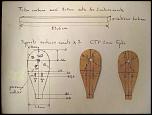
Options retenues (au début) : rayon 50cm, structure en T, tubes carbone 8X8 mm pour les essais mais finalement du 10X10mm pour résoudre les problèmes d'oscillation et de résistance, nacelle suspendue avec caméra et batterie (amortissement mousse dense).
Le concept majeur, c'est la recherche de légèreté sur ce qui concerne la propulsion et le contrôle (bras, moteur, hélice, gyros). Tout le reste (batterie, caméra) est sur amortissement, ce qui permet d'être isolé des variations rapides d'assiette mais d'être solidaire de l'ensemble et d'apporter de l'inertie et de la stabilité.
Pour ceux qui sont tentés par la construction, voici les schémas et photos au fur et mesure de la réalisation, tout le reste est très bien décrit sur RCExplorer.
Les supports moteurs sont collés à la super glue et sécurisés par un collier nylon. Les extrémités des tubes carbones sont renforcées sur 3 cm à l'intérieur avec du balsa. La pièce en T est collée et ses extrémités renforcées avec une bande fine de tissu de verre enduit de glue autour du tube. Idem au croisement des deux tiges carbone au centre. C'est ultra léger mais contrairement aux tubes carbone 10X10 mm, ça risque d'exploser en cas de crash.
Les perçages moteurs suivent les axes médians moteur/centre afin de pouvoir régler l'inclinaison des moteurs avants et de leur donner de l'anticouple, j'ai testé et c'est important car le tricopter vole mieux lorsque tout est symétrique. il faut compter une rondelle de 0.8 à 1 mm et la moitié pour les 2 rondelles intermédiaires. En stationnaire, le moteur arrière est alors légèrement penché (à droite s'il est monté vers le haut et à gauche s'il est monté vers le bas) avec le même angle que les deux moteurs avants.
Testée aussi, la divergence des moteurs vers le bas, façon fusée Apollo : très peu d'intérêt, perte de poussée, aucun gain sur le retour de l'assiette à plat (ça par en glissade lentement mais surement comme avant).
BANDE DE VEINARDS, je viens de faire un résumé à la fin de tous les réglages :
http://www.modelisme.com/forum/heli...cm-pour-prise-de-vues-aeriennes-et-fpv-4.html
et finalement, la forme sera en Y et non en T.
Options retenues (au début) : rayon 50cm, structure en T, tubes carbone 8X8 mm pour les essais mais finalement du 10X10mm pour résoudre les problèmes d'oscillation et de résistance, nacelle suspendue avec caméra et batterie (amortissement mousse dense).
Le concept majeur, c'est la recherche de légèreté sur ce qui concerne la propulsion et le contrôle (bras, moteur, hélice, gyros). Tout le reste (batterie, caméra) est sur amortissement, ce qui permet d'être isolé des variations rapides d'assiette mais d'être solidaire de l'ensemble et d'apporter de l'inertie et de la stabilité.
Pour ceux qui sont tentés par la construction, voici les schémas et photos au fur et mesure de la réalisation, tout le reste est très bien décrit sur RCExplorer.
Les supports moteurs sont collés à la super glue et sécurisés par un collier nylon. Les extrémités des tubes carbones sont renforcées sur 3 cm à l'intérieur avec du balsa. La pièce en T est collée et ses extrémités renforcées avec une bande fine de tissu de verre enduit de glue autour du tube. Idem au croisement des deux tiges carbone au centre. C'est ultra léger mais contrairement aux tubes carbone 10X10 mm, ça risque d'exploser en cas de crash.
Les perçages moteurs suivent les axes médians moteur/centre afin de pouvoir régler l'inclinaison des moteurs avants et de leur donner de l'anticouple, j'ai testé et c'est important car le tricopter vole mieux lorsque tout est symétrique. il faut compter une rondelle de 0.8 à 1 mm et la moitié pour les 2 rondelles intermédiaires. En stationnaire, le moteur arrière est alors légèrement penché (à droite s'il est monté vers le haut et à gauche s'il est monté vers le bas) avec le même angle que les deux moteurs avants.
Testée aussi, la divergence des moteurs vers le bas, façon fusée Apollo : très peu d'intérêt, perte de poussée, aucun gain sur le retour de l'assiette à plat (ça par en glissade lentement mais surement comme avant).