jpparisy
Patibulaire mais presque
Jusqu'à présent, je n'ai parlé que d'un modèle de transistor : le BS170, un MOSFET de type canal N.
Les MOSFETs canal N sont les plus courants et les plus faciles à mettre en oeuvre : à partir d'une tension de commande faible, ils agissent comme des interrupteurs entre la tension de référence (0 V) et le dispositif à commander, sans nécessiter de composant supplémentaire.
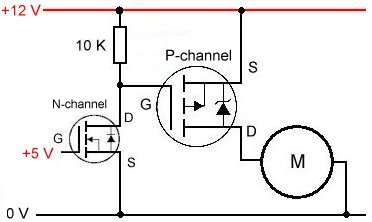
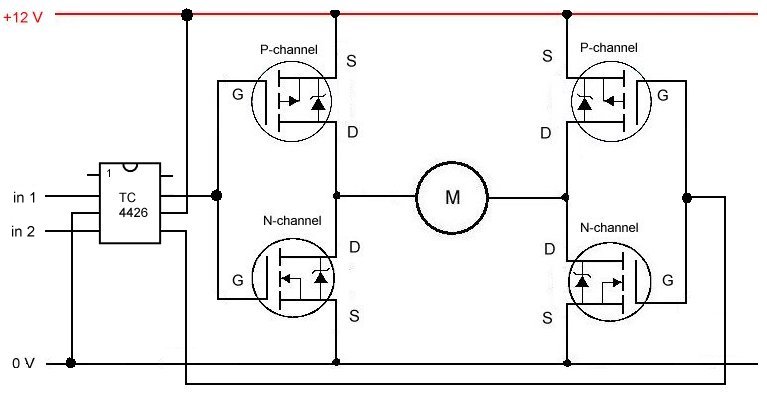
Il existe aussi des MOSFETs de type canal P, complémentaires des types N, dont je parle plus loin.
Si vous voulez approfondir la théorie, vous pouvez aller lire l'article sur les MOSFETs dans Wikipedia. Mais cela n'a rien d'une obligation, les composants fonctionneront quand même !")
Revenons au BS170 qui peut commander un courant jusqu'à 500 mA. Si vous avez besoin d'un courant supérieur, il vous faut choisir un autre composant.
Les principaux critères de choix sont l'intensité et la tension maximales. Il vous faut donc, en première approche, sélectionner quelques modèles dans le catalogue de votre fournisseur préféré, puis rentrer dans les détails en consultant leurs fiches de caractéristiques (datasheets en anglais). Il n'existe pas de datasheet en français, mais il n'y a pas besoin d'être un expert pour les lire.
Les caractéristiques à prendre en compte sont :
Bonne recherche dans les datasheets !
Les MOSFETs canal N sont les plus courants et les plus faciles à mettre en oeuvre : à partir d'une tension de commande faible, ils agissent comme des interrupteurs entre la tension de référence (0 V) et le dispositif à commander, sans nécessiter de composant supplémentaire.
Il existe aussi des MOSFETs de type canal P, complémentaires des types N, dont je parle plus loin.
Si vous voulez approfondir la théorie, vous pouvez aller lire l'article sur les MOSFETs dans Wikipedia. Mais cela n'a rien d'une obligation, les composants fonctionneront quand même !
Revenons au BS170 qui peut commander un courant jusqu'à 500 mA. Si vous avez besoin d'un courant supérieur, il vous faut choisir un autre composant.
Les principaux critères de choix sont l'intensité et la tension maximales. Il vous faut donc, en première approche, sélectionner quelques modèles dans le catalogue de votre fournisseur préféré, puis rentrer dans les détails en consultant leurs fiches de caractéristiques (datasheets en anglais). Il n'existe pas de datasheet en français, mais il n'y a pas besoin d'être un expert pour les lire.
Les caractéristiques à prendre en compte sont :
- VDS : tension maximum d'alimentation entre la Source et le Drain.
- VGS : tension maximum entre la Gate et la Source.
- ID : intensité maximale supportée, il vaut mieux prévoir large !
- IDSS : intensité consommée lorsque la Gate est fermée (0 V), c'est le courant de fuite lorsque l'interrupteur est ouvert, il faut qu'elle soit la plus basse possible.
- RDS(on) : résistance de passage lorsque l'interrupteur est fermé.
- Cette valeur est importante car elle n'est pas nulle, lorsque le transistor conduit, il va dissiper de la puissance sous forme de chaleur. Pour connaître cette puissance, en watts, on applique la formule P = RDS(on) * I * I.
- VGS(th) : tension de déclenchement de la Gate, plus elle est basse, meilleur c'est pour nos applications en faible tension.
Bonne recherche dans les datasheets !
")