jpparisy
Patibulaire mais presque
Ces montages, permettant de commander de 1 à 8 servos sur la même voie, proposent deux modes de fonctionnement : le mode tout-ou-rien et le mode séquentiel.jpparisy;2100301 à dit:Il permet, par exemple, de remplacer des électro-aimants par des servos normaux, ou de commander des moteurs à balais en utilisant des micro-swiches actionnés par les palonniers des servos.
Le mode tout-ou-rien est facile à comprendre, un des servos va dans un sens ou dans l'autre suivant la position du manche ou le nombre d'appuis sur le bouton.
Le mode séquentiel est utile lorsqu'on veut commander un moteur à balais (brushed). Nous avons vu que pour inverser le sens de rotation d'un tel moteur, nous avions besoin d'un pont en H. Le montage proposé était purement électronique, avec des MOSFETs et un circuit intégré comme driver.
Pour ceux que cela pourrait effrayer, ce pont peut être réalisé avec des micro-switches commandés par le palonnier d'un servo. Le schéma du pont en H est le suivant :
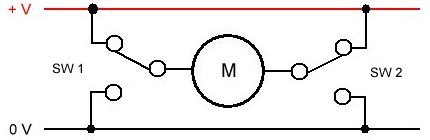
Les micro-switches sont des inverseurs commandés par une très faible force, il en existe de nombreux modèles, capables de supporter des tensions et des intensités très variées.
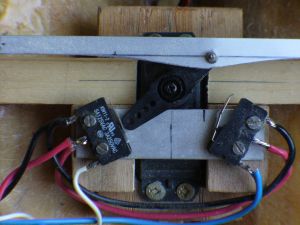
Ce genre de solution nécessite toutefois de monter les micro-switches sur une platine et donc un peu de mécanique pour ajuster leurs positions. Voici un exemple de réalisation, extrait de cet article de Thierry Augereau sur Navimodélisme RC :



")